Publications
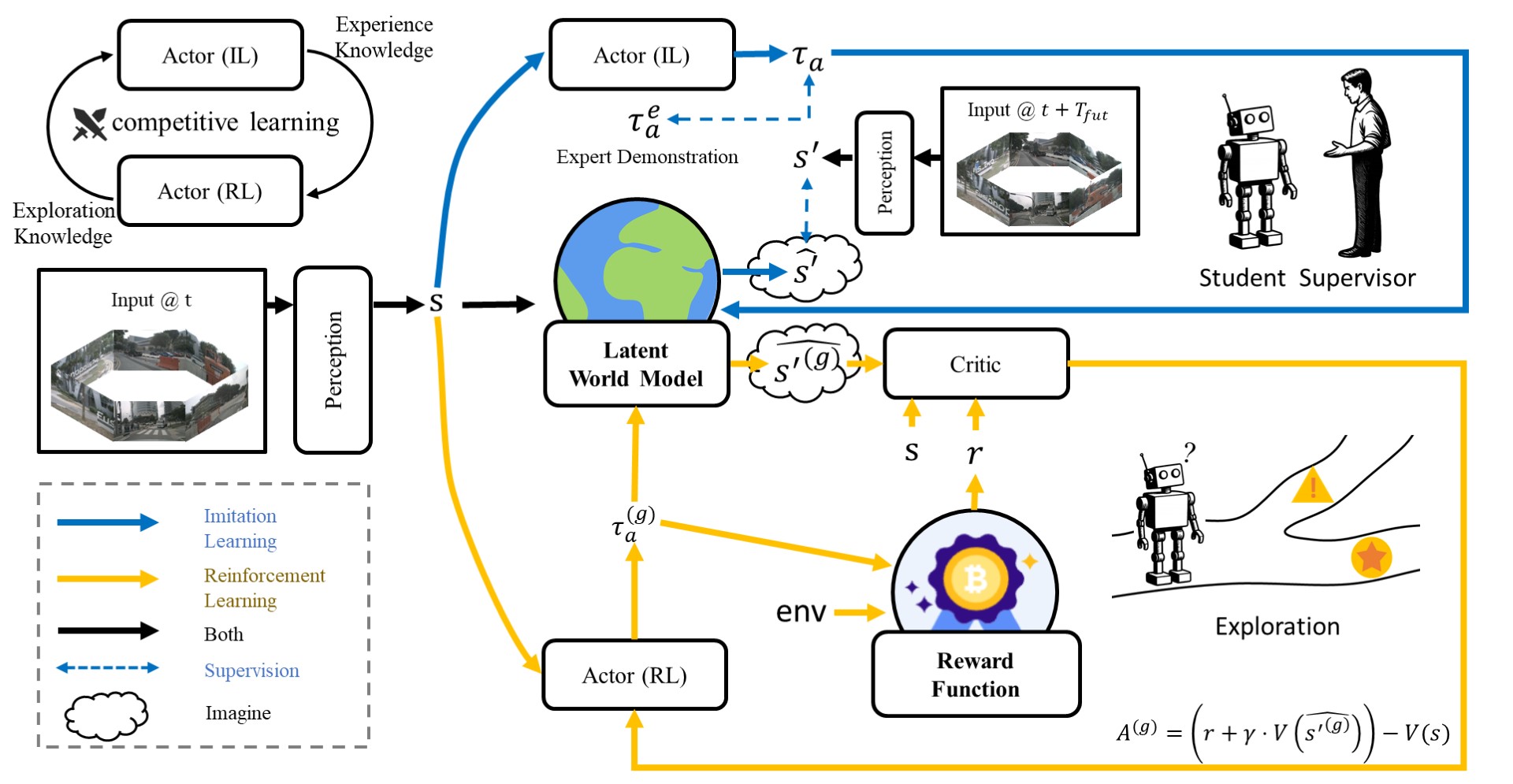
CoIRL-AD: Collaborative–Competitive Imitation–Reinforcement Learning in Latent World Models for Autonomous Driving
ICML 2026 - Accept
We are trying to conbine the advantage of imitation learning (converge fast) and reinforcement learning (trial and error) to enhance the generalization ability of autonomous driving models.
[ website ] [ paper ] [ code ] [ HuggingFace ]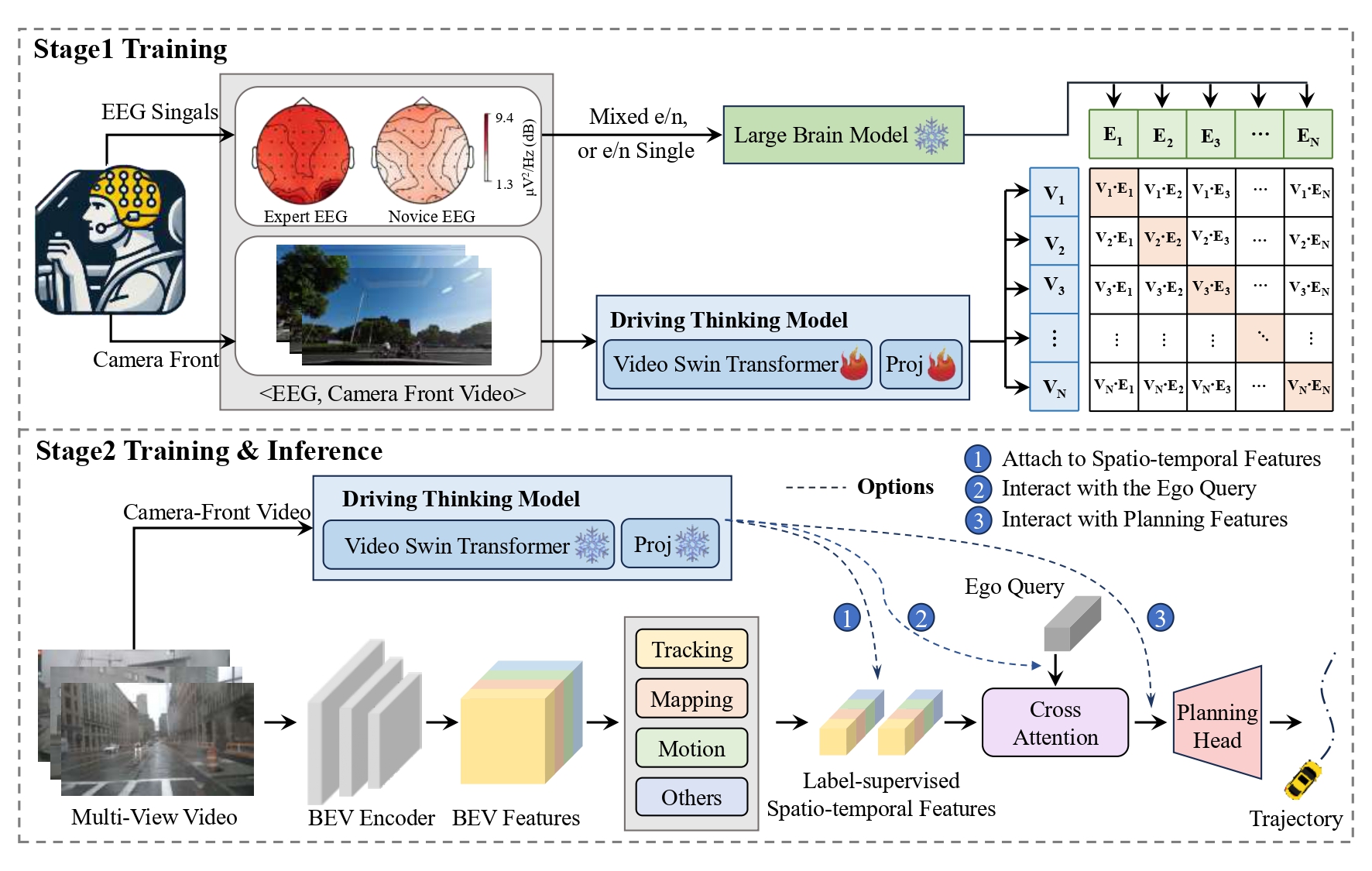
Embodied Cognition Augmented End2End Autonomous Driving
NeurIPS 2025 - Accept
We collect expert/novide drivers'
Large Language Models Powered Context-aware Motion Prediction
IROS 2024 - Accept
We first teach Large Language Model (GPT4-V) to understand Bird's Eye View like transportation context maps and output context information (intention, affordance, and scenario). Then, these context information will integrated into motion prediction pipeline to assists motion prediction.
[ website ] [ paper ] [ code ]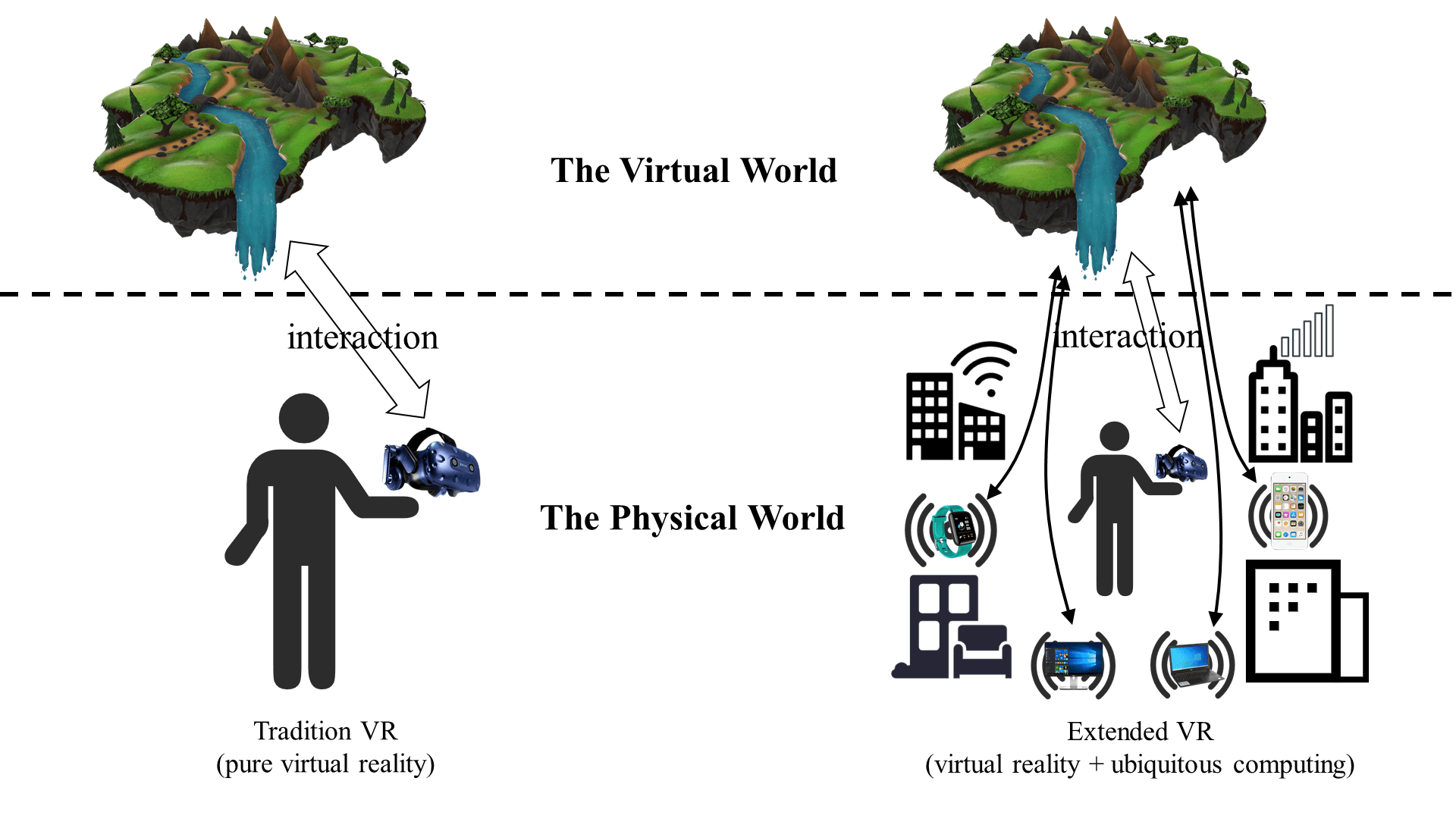
Extended VR: Exploring the Integration of VR Experiences and Real-world Engagement
Designing Interactive Systems 2023 Companion (DIS'23 Companion) - Accept
In this paper, we explore whether the combination of virtual reality and ubiquitous computing can help overcome the limitation that Head-Mounted Displays based VR systems is often isolated from reality.
[ paper ]